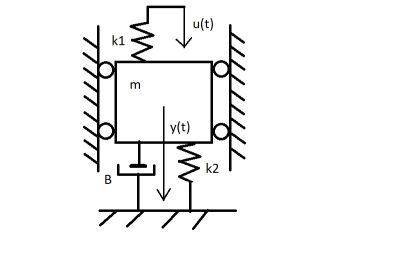
The examined mechanical system is constructed with a mass m. From its top, the mass is fixed to a spring with stiffness k2[N/m]. The spring with stiffness k2 is connected in parallel with a viscous suppressor B[N·s/m]. Both these mechanical elements are fixed to the bottom of the mass. The spring k1 is connected to the mass from above. The input signal is a shift u(t) of spring k1; its Laplace (transformed) form is U(s). The output signal is a shift y(t) of mass gravity center; the Laplace form of the y(t) is Y(s). A motion equation for mechanical system is written down. Afterwards the motion equation is transformed to Laplace form. The Laplace form of the motion equation is used to designate a transfer function H(s); in example the transfer function is marked as G(s). A mechanical time constant appears in the final formula of transfer function.
A designation of the transfer function of the examined mechanical system starts with writing the motion equation. The equation of motion ties all the forces in one equation i.e. vector sum of all the forces is equal to zero. An important assumption is made in the examined example i.e. the inital conditions are equal to zero.
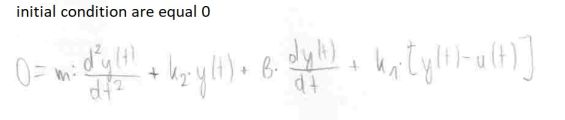
The system's equation of motion has been written above, thus, it can be now transformed to the Laplace form i.e. the function in the domain of time t will be trasformed to the function in the domain of a variable s. During transformation following naming convention is done: the Laplace form of the input signal is written as U(s), regarding the output signal, its Laplace form is written as Y(s).

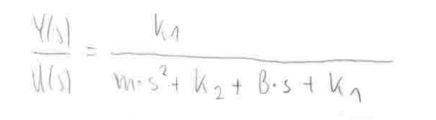
In order to designate the transfer function, which is named G(s) in considered example, the equation in the Laplace form is rewritten. Just for rememberence it should be kept in mind that the transfer function G(s) is a relation of the Laplace of the output signal Y(s) divided by the Laplace form of the input signal U(s).

Just for rememberence it should be kept in mind that the transfer function G(s) is a relation of the Laplace of the output signal Y(s) divided by the Laplace form of the input signal U(s).
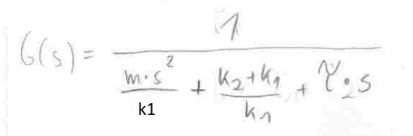
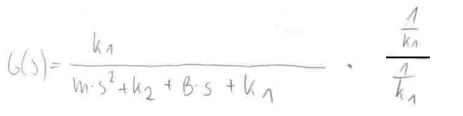
In order to simplify the equation for the transfer function G(s) and to designated the time constant T of the system. The equation is by an iverse of the first spring constant divided by the iverse of the first spring constant.
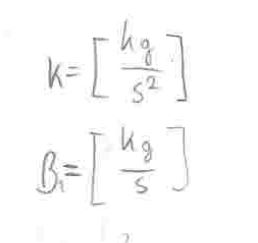
The formula for the examined system's time constant T is given below. Additionally, the physical units of the spring's constant and the viscous damper's constant are given for the reference. By a division of the viscous damper constant by the spring's constant is can proven that the result's physical unit is the SI unit of time i.e. the second [s]. All what needs to be done is to use the basic SI units instead their derivatives.

By adding the relation for the system's time constant T; the equation can be rewritten to the following form.
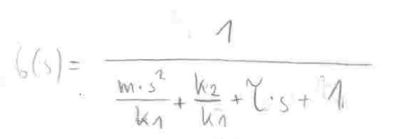
The examined mechanical system transfer function G(s) can written in its final from by multiplification of k1/k1, which is equal to 1. This allows to write the transfer function equation G(s) in the following form.