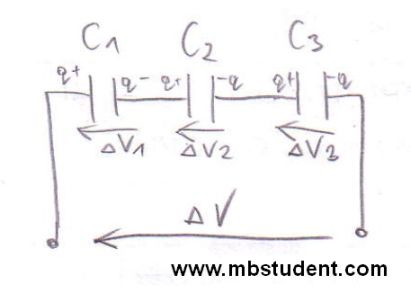
Capacitance C is a one of basic parameters of electric circuits next to resistance R and inductivity L. Capacitance C is defined as relation of charge Q to voltage V → C=Q/V. The measurement unit of capacitance is Farad → [C]=1F, Farad is a derived unit of SI system. Sometimes it is essential to calculate capacitance of electrical circuit which contains a few capacitors in its topology, therefore, it is often said that total capacitance of electrical circuit is computed. Sometimes during circuits analysis a subject is to calculate the total capacitance which is seen from specific circuit’s terminals.